



































Il semble parfois difficile de croire que nous, les humains, avons réussi à explorer si peu de ce que nous avons tant: les mers. Les océans couvrent quelque 70% de la surface du monde, mais nous n'avons cartographié que 20% du plancher océanique. Les 228 000 espèces océaniques que nous connaissons représentent environ dix pour cent du total estimé des espèces aquatiques. Et presque toute la vie que nous connaissons et la zone que nous avons explorée à fond sont limitées aux premières centaines de mètres de la surface.
La rareté de nos efforts d’enquête en eau profonde a beaucoup à voir avec l’hostilité de la mer envers ceux qui n’ont pas évolué pour y survivre. Il faut une ingénierie extrême et des machines extrêmement chères pour vivre et travailler même à quelques mètres, et même alors, les sous-mariniers deviennent rapidement complètement isolés du reste du monde une fois qu'ils sont là-bas. La communication sous-marine est particulièrement difficile, car les propriétés de l'eau de mer confondent les efforts pour l'utiliser comme moyen de communication.
Aussi difficile que cela puisse être, la communication sous-marine est possible, et dans cet article, nous allons examiner quelques modalités qui ont rendu possible l'exploitation sous la mer, et une nouvelle technologie qui pourrait simplement étendre Internet sous les vagues.
Bonjour, Gertrude?
Pendant la plupart des premières années du Silent Service, une fois qu'un sous-marin a été submergé, il était seul. Pour les sous-marins et sous-marins de la Première Guerre mondiale, ce fait était de peu de conséquence pratique car ces bateaux fonctionnaient principalement comme des navires de surface, ne se submergeant que pour attaquer ou pour échapper à la poursuite. Les autorités de commandement n’ont guère eu besoin de les contacter pendant la petite fraction de temps où elles ont été submergées, et comme elles opéraient pour la plupart seules et attaquaient à l’initiative du capitaine.
Plus tard au cours du siècle, alors que les tactiques sous-marines se transformaient en attaques «Wolf Pack», le besoin de communications sous-marines entre les bateaux pour coordonner les attaques est devenu clair. Les capitaines de sous-marins et de sous-marins dépendaient de leurs radios haute fréquence (HF) pour communiquer entre les bateaux du pack et coordonner leurs attaques contre les convois, mais cela pouvait les exposer à la détection par les forces opposées à l'aide d'un radiogoniomètre, et comme ils en avaient besoin pour être apprêtés à utiliser leurs radios, ils étaient faciles à cueillir pour les navires de surface et les avions.

L'un des premiers modes de communication sous-marine mis en place par la marine américaine était le téléphone sous-marin AN / BQC-1. Il s'agissait d'un appareil alimenté par batterie et entièrement portable qui était utilisé par les navires de surface pour communiquer avec les sous-marins immergés et pour que les sous-marins communiquent entre eux. Communément appelé «Gertrude», l'appareil était autonome à l'exception du transducteur monté sur la coque. L'unité de base avait un combiné téléphonique pour les communications vocales entre les unités; en outre, le Gertrude pourrait être amené à émettre une tonalité audio de 24,26 kHz pour appeler d'autres navires exploitant des sonars utilisant cette fréquence.
Pour transmettre la voix, la Gertrude a utilisé une méthode de modulation familière aux radio-amateurs: la bande latérale unique. Tout comme les ondes radio, une onde porteuse acoustique peut être modulée en amplitude. Dans le cas du Gertrude, l'onde porteuse se situait entre 8,3375 kHz et 11,0875 kHz, et comme en radio, le récepteur et l'émetteur devaient être réglés sur la même fréquence porteuse. Du côté de l'émetteur, le signal AM a été filtré pour éliminer l'onde porteuse et l'une des bandes latérales, laissant un signal à bande latérale unique qui a été appliqué au transducteur. Le récepteur a démodulé le signal SSB avec le détecteur de produit standard et l'agencement d'oscillateur à fréquence de battement, très similaire à celui utilisé dans les signaux radio SSB mais à des fréquences différentes.

L'AN / BQC-1 Gertrude est restée en service jusqu'à la fin de la Seconde Guerre mondiale et jusqu'à la guerre froide. Une unité plus puissante, l'AN / WQC-2, a été mise en service en 1945 et une version de la technologie demeure à ce jour dans presque tous les navires de l'US Navy. Les téléphones sous-marins modernes utilisent toujours le schéma de modulation SSB et prennent toujours en charge les fréquences qui ont été établies par la Marine pour la Gertrude d'origine, même si l'électronique derrière tout cela a considérablement changé au cours des décennies.
Bas et long
Aussi utiles qu'ils soient, les téléphones acoustiques sous-marins ont des capacités limitées. La portée des téléphones acoustiques est limitée; l'AN / BQC-1 était mieux utilisé pour les communications vocales à moins de 500 mètres (365 m), bien que son ping de 24,26 kHz puisse atteindre dix fois cette distance. Les ondes acoustiques sont sujettes aux mêmes caprices de propagation que les ondes radio, avec des réflexions sur les surfaces solides et la diffraction par des couches de température ou de salinité de l'eau différentes entraînant des interférences par trajets multiples ou même une perte totale de signal.
Les sous-marins ont également évolué vers un rôle très différent au cours des années de la guerre froide, lorsque des bateaux à propulsion nucléaire sont arrivés sur les lieux. Capables de mois en mer, ces bateaux sont devenus les plates-formes parfaites pour les missiles balistiques, qui devraient être en contact avec les autorités de commandement à un degré que les capitaines des sous-marins de la Seconde Guerre mondiale n'auraient jamais cru possible. Mais les ondes radio ne pénètrent généralement pas dans l'eau de mer, ce qui pose le problème d'un sous-marin qui doit régulièrement faire surface pour vérifier les nouvelles commandes et perdre son seul avantage tactique: la furtivité.
Pour garder les sous-marins en toute sécurité sous la surface, les commandements navals ont commencé à explorer l'extrémité la plus basse du spectre radioélectrique. Alors que les bandes haute fréquence (HF: 3 MHz à 30 MHz) et basse fréquence (LF: 30 kHz à 300 kHz) sont parfaitement capables d'atteindre le monde entier grâce à la réfraction ionosphérique, la conductivité élevée de l'eau de mer atténue rapidement les signaux dans ces bandes .
En diminuant un peu le spectre, la bande très basse fréquence (VLF: 3 kHz à 30 kHz) commence à présenter une pénétration décente de l'eau de mer, jusqu'à une profondeur de peut-être 20 mètres. Ce n'est pas assez profond pour assurer la furtivité de la plupart des sous-marins, qui doivent dérouler un long fil d'antenne pour suivre derrière eux lorsqu'ils naviguent beaucoup trop près de la surface pour plus de confort. Les communications VLF souffrent également de limitations de bande passante, ce qui rend les communications vocales peu pratiques. Les communications VLF sont donc limitées à un débit binaire de 300 bps environ. Un autre inconvénient est que les énormes réseaux d'antennes et les émetteurs haute puissance nécessaires pour le VLF rendent les communications bidirectionnelles impossibles.
En allant encore plus loin dans le spectre, les signaux dans la bande extrêmement basse fréquence (ELF: 3 Hz à 30 Hz) sont capables de pénétrer 120 mètres d'eau de mer, ce qui est suffisamment profond pour qu'un sous-marin conserve sa furtivité. L'US Navy a commencé à enquêter sur le groupe ELF en 1968 avec Project Sanguine. Avec des longueurs d'onde de 10 000 à 100 000 kilomètres, un émetteur ELF nécessite d'énormes antennes; en effet, la proposition initiale d'une station ELF dans le Wisconsin aurait enterré des câbles d'antenne sous 40% de la superficie de l'État. Ces câbles auraient fonctionné avec 800 mégawatts de puissance lors de la transmission.
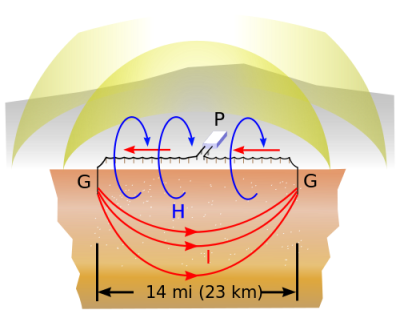
Le projet Sanguine n'a jamais été construit, vaincu par les militants anti-guerre et les faucons du budget. La série de projets ELF à échelle réduite que la Navy a proposée n'a pas non plus été construite, jusqu'à ce qu'en 1989, le projet ELF soit mis en ligne. Il y avait deux émetteurs, un dans le Wisconsin et un dans la péninsule supérieure du Michigan. Les lignes d'alimentation des antennes mesurent de 22 à 44 km (14 à 28 milles), suspendues à des poteaux en bois comme des lignes de service et reliées à d'énormes tiges de terre enfoncées profondément dans le substratum rocheux. Lorsqu'il est sous tension, le courant circule entre les tiges de terre et à travers le socle rocheux de granit, créant un champ magnétique massif qui génère les ondes ELF. C'était essentiellement une antenne à boucle géante faite de roche.
Le système achevé était capable d'envoyer un message codé sur 76 MHz à un sous-marin submergé de 122 mètres au large de la Floride. Malheureusement, la bande passante du signal était si faible qu'il a fallu 15 minutes pour envoyer un seul groupe de codes à trois caractères. Le projet ELF ne pouvait que servir de signal «de sonnerie» pour notifier un sous-marin à la surface et utiliser d'autres moyens pour recevoir un message complet. Le système a été arrêté en 2004 une fois que la technologie VLF avait suffisamment avancé pour que les sous-marins puissent l'utiliser sans crainte de détection.
WiFi sous les vagues
Les communications sous-marines à bande passante limitée ont certainement leur place, mais il est possible de communiquer en toute sécurité sous l'eau à des débits binaires élevés si de nouvelles recherches sont payantes. Dans un article récent, Basem Shihada et al de l'Université des sciences et technologies du Roi Abdallah ont démontré un système qu'ils appellent «Aqua-Fi» qui étend Internet au royaume sous-marin. En utilisant principalement des composants standard, y compris un Raspberry Pi 3b, ils ont pu construire un réseau sans fil conforme IEEE 802.11 avec une portée allant jusqu'à 20 mètres. Des LED et des lasers ont été utilisés pour les émetteurs, les lasers offrant une plus grande portée mais au détriment de la directivité. Lors de tests utilisant des smartphones étanches et des lasers bleus et verts, ils ont pu atteindre 2,11 Mbps et effectuer des appels Skype via la liaison Aqua-Fi.

Il est peu probable qu'Aqua-Fi ait beaucoup d'avenir en tant que réseau de sous-marins, mais la guerre sous-marine est loin d'être la seule activité qu'un tel système puisse soutenir. La recherche sous-marine pourrait bénéficier de la mise à disposition d'Internet sous la surface; on pourrait imaginer une bouée à énergie solaire avec une liaison satellite au-dessus de la surface et une chaîne de points d'accès Aqua-Fi traînant dans les profondeurs en dessous. Les plongeurs, les véhicules télécommandés ou les drones autonomes pourraient profiter d'une connexion à temps plein à Internet, ce qui entraînerait des avancées en biologie marine, en géologie, en conservation ou même en loisirs comme la plongée sportive. On peut descendre avec ça!

{kind=link}